Prof. Sharad Bhartiya Research Group IIT Bombay
Automation Lab
Switched Systems: State Estimation and Control
Switched systems represent a class of hybrid dynamical systems wherein occurrence of a discrete event causes the evolution of the continuous states to switch from one operating mode to another. Switched system dynamics appear in manufacturing systems during start-up/ shut-down, grade transitions, decision-making, and manipulation of on-off valves.
Our group's research focus in this area are the following:
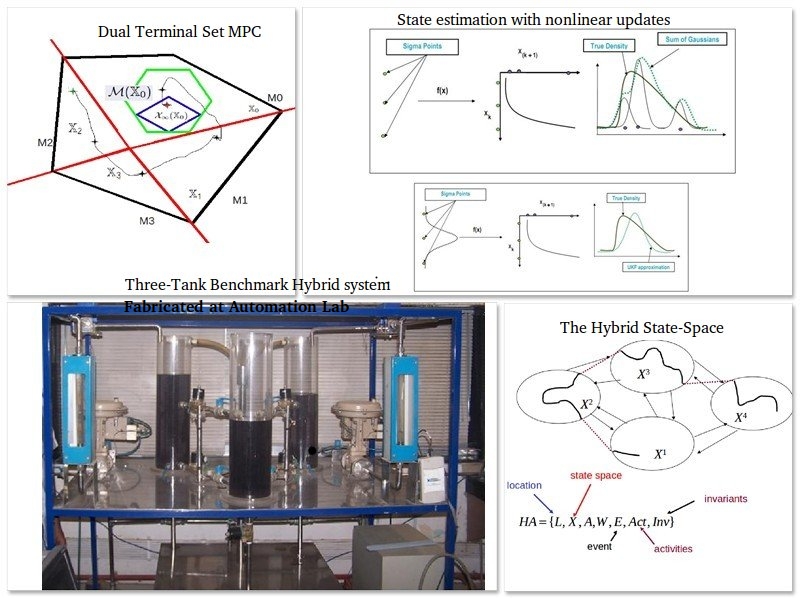
- A Multiple Linear Model Approach for Modeling of Nonlinear Switched Systems: Most modeling formalisms for hybrid systems are based on linear dynamics along with the switching logic and neglect nonlinearities which may exist in each mode. Our group works on using multiple-linear models to describe nonlinearities in each mode. The research focus has been on a systematic development of an algorithm that provides a guide to the questions of how many such linear models should be used and their locations in the hybrid state-space.
- Development of stabilizing MPC for switched systems: For control of switched systems, the MPC problem requires an on-line solution of a Mixed Integer Program. Since the worst case complexity of the optimization problem increases exponentially with respect to the number of integer variables, on-line computing of the MPC control law for problems with
large number of operating modes and/or large horizons is usually expensive. Our group is working on a novel MPC formulation, which enables tuning the trade-off between the complexity of the control algorithm with the optimal performance of the closed-loop
system while ensuring stability.
- Nonlinear Bayesian estimation of switched systems (with Prof. Mani Bhushan): Most sampling based approaches to estimation of nonlinear systems approximate the prior density as a Gaussian as in UKF or build a piecewise approximation of the nonlinear map and subsequently use a Gaussian approach for each piece as in ensemble Kalman filter or Gaussian Sum filter. Both of these approaches use a linear update equation. Our group works on building a monolithic approximation of the prior density and then analytically derive the posterior. The resulting updates are nonlinear in nature. This work has the potential of using fewer number of particles to obtain equivalent accuracy of large sample based filters.