Prof. Sharad Bhartiya Research Group IIT Bombay
Automation Lab
Point location problem in EMPC
- Details


Point location problem in EMPC (with Prof. Mani Bhushan)
 In recent literature, explicit model predictive control (e-MPC) has been proposed
In recent literature, explicit model predictive control (e-MPC) has been proposed
to facilitate implementation of the popular model predictive control (MPC) approach to fast
dynamical systems. e-MPC is based on multi-parametric programming. The key idea in e-
MPC is to replace the online optimization problem in MPC by a point location problem. After
locating the current point, the control law is simply computed as an appropriate linear function
of the states. A variety of approaches have been proposed in literature for the point location
problem. In this work, we present a novel approach based on linear machines for solving this
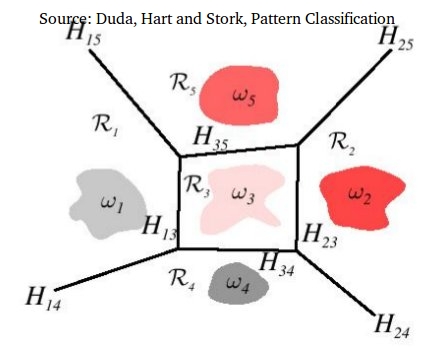
problem. Linear machines are widely used in multi-category pattern classification literature for
developing linear classifiers given representative data from various classes. The idea in linear
machines is to associate a linear discriminant function with each class. A given point is then
assigned to the class with the largest discriminant function value. In this work, we develop an
approach for identifying such discriminant functions from the hyperplanes characterizing the
given regions as in multi-parametric programming. Apart from being an elegant solution to the
point location problem as required in e-MPC, the proposed approach also links two apparently
diverse fields namely e-MPC and multi-category pattern classification. To illustrate the utility
of the approach, it is implemented on a hypothetical example as well as on a quadruple tank
benchmark system taken from literature.