Prof. Sharad Bhartiya Research Group IIT Bombay
Automation Lab
Nonlinear Bayesian estimation of switched systems
- Details


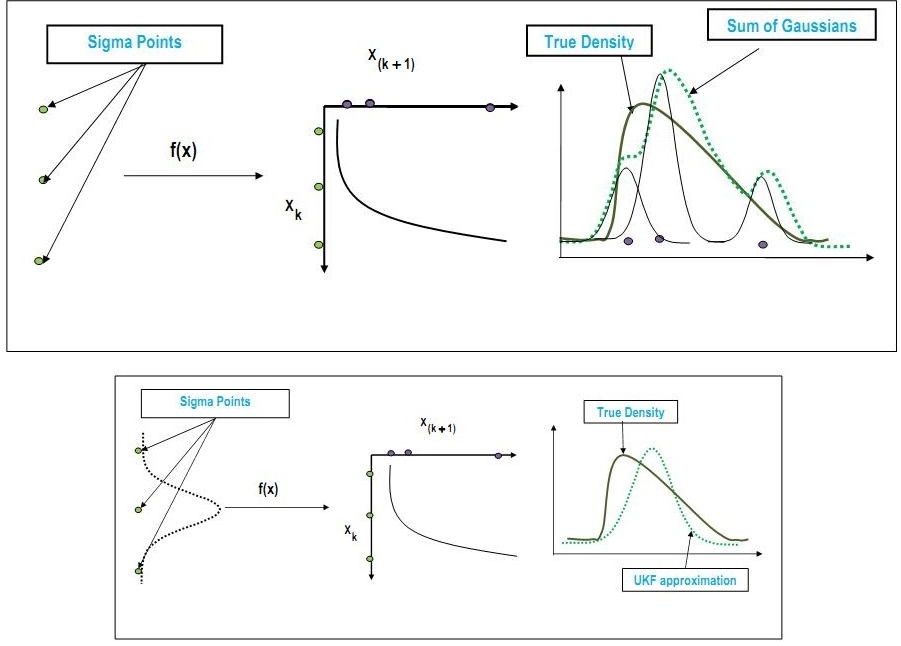 Bayesian estimation of nonlinear systems (with Prof. Mani Bhushan): Existing state estimation techniques for nonlinear function either re-approximate the non-Gaussian prior with a Gaussian density as in Unscented Kalman Filter(UKF) or approximate the function to have a Gaussian prior as in Extended Kalman Filter (EKF). Yet another approach consists of locally approximating the density at multiple local locations as in Ensemble Kalman Filter. In our work, we use sampling approaches to build a global approximation of the prior followed by incorporation of the measurement to obtain the posterior. Our approach results in a nonlinear update equation.
Bayesian estimation of nonlinear systems (with Prof. Mani Bhushan): Existing state estimation techniques for nonlinear function either re-approximate the non-Gaussian prior with a Gaussian density as in Unscented Kalman Filter(UKF) or approximate the function to have a Gaussian prior as in Extended Kalman Filter (EKF). Yet another approach consists of locally approximating the density at multiple local locations as in Ensemble Kalman Filter. In our work, we use sampling approaches to build a global approximation of the prior followed by incorporation of the measurement to obtain the posterior. Our approach results in a nonlinear update equation.