Prof. Sharad Bhartiya Research Group IIT Bombay
Automation Lab
A Dual Terminal set MPC formulation for control of linear switched systems
- Details


A Dual Terminal set MPC formulation for control of linear switched systems
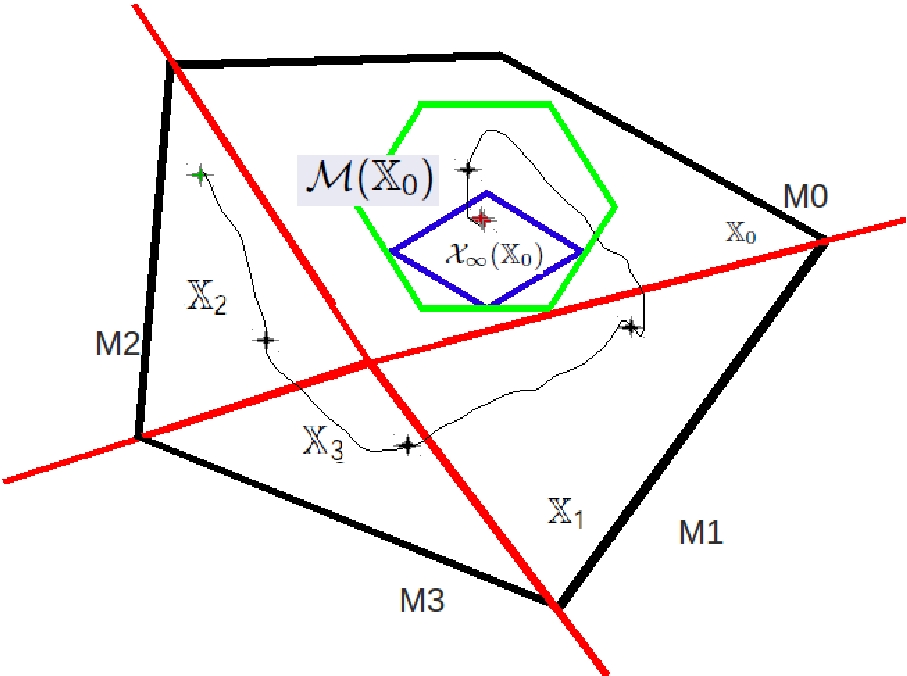 Switching characteristics of hybrid systems bring discontinuity and nonlinearity in their course of operation and pose major challenges in developing stabilizing Model Predictive Control (MPC) for them. For Piecewise Affine (PWA) Systems, the MPC problem requires on-line solution of Mixed Integer Programs (MIPs) for obtaining the input profile. Since, complexity of the optimization problem that needs to be solved in MPC increases combinatorially with respect to the integer variables, on-line computing of MPC control law for large scale problems and/or problems with large horizons turns out to be expensive.This work attempts to synthsize a stabilizing MPC formulation, under the popular framework of terminal cost - terminal constrained set MPC, which enables tuning the complexity of the control algorithm while ensuring stability. The proposed approach introduces a novel idea of a pre-terminal set, that eliminates the need for binary decision variables to model mode transitions after the trajectory enters in pre-terminal set, thereby reducing the on-line complexity although at the expense of optimality. Currently, these ideas are being extended to robust tube-based MPC for switched systems.
Switching characteristics of hybrid systems bring discontinuity and nonlinearity in their course of operation and pose major challenges in developing stabilizing Model Predictive Control (MPC) for them. For Piecewise Affine (PWA) Systems, the MPC problem requires on-line solution of Mixed Integer Programs (MIPs) for obtaining the input profile. Since, complexity of the optimization problem that needs to be solved in MPC increases combinatorially with respect to the integer variables, on-line computing of MPC control law for large scale problems and/or problems with large horizons turns out to be expensive.This work attempts to synthsize a stabilizing MPC formulation, under the popular framework of terminal cost - terminal constrained set MPC, which enables tuning the complexity of the control algorithm while ensuring stability. The proposed approach introduces a novel idea of a pre-terminal set, that eliminates the need for binary decision variables to model mode transitions after the trajectory enters in pre-terminal set, thereby reducing the on-line complexity although at the expense of optimality. Currently, these ideas are being extended to robust tube-based MPC for switched systems.